

Multi-Layer Control-Architecture for Semi-Autonomous Service Robots 2 de xul. de 2007
Visto 2653
veces
Multi-Layer Control-Architecture for Semi-Autonomous Service Robots
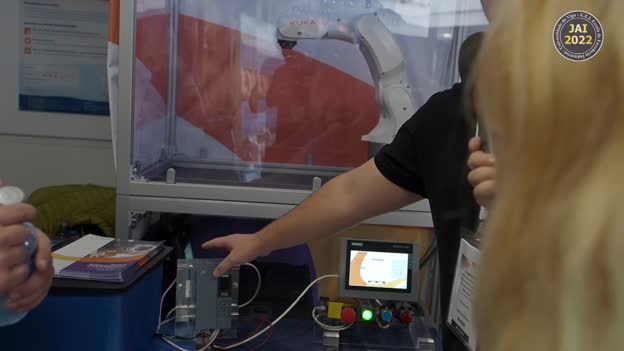
This talk presents the results achieved with the software-architecture MASSiVE designed for semi-autonomous service-robots. It is shown that the consequent inclusion of the principle of semi-autonomy into a hybrid multilayer control architecture results in feasible and robust execution of tasks on a high level of abstraction.
i18n.one.Series:
Multi-Layer Control-Architecture for Semi-Autonomous Service Robots
Marco Cyriacks
Institute of Automation Technology, University of Bremen
Vídeos da mesma serie

Tamén che interesan










Alumnos Uvigo opinan: Grao en Ciencias da Linguaxe e Estudos Literarios
Universidade de Vigo: aquí todo é posible
27 de abr. de 2016


En que consiste? Grao en Ciencias da Linguaxe e Estudos Literarios
Universidade de Vigo: aquí todo é posible
27 de abr. de 2016

Alumnos Uvigo opinan: Grao en Linguas Estranxeiras
Universidade de Vigo: aquí todo é posible
27 de abr. de 2016


Alumnos Uvigo opinan: Grao en Linguas Estranxeiras
Universidade de Vigo: aquí todo é posible
27 de abr. de 2016

COPA-DATA: Benvido ao 2030: "Plug & Produce", o potencial da fabricación modular
Conferencia
18 de nov. de 2022

